Закон движения поршней в бета-Стирлинге с ромбическим приводом
Ну а теперь о бета-конструкции двигателя Стирлинга. Смотрим на график. Вроде бы на первый взгляд ни чем он не отличается от обычного непрерывного движения поршней в двигателе с КШМ. Но это не совсем так. Нижняя красная линия (нижняя мёртвая точка вытеснителя) ныряет ниже нулевого уровня, т.е. ниже верхней мёртвой точки рабочего цилиндра. А это как раз и означает, что в период 3-4 вытеснитель залазит в область цилиндра рабочего поршня, т.е. движение поршней в бете приближается к идеальному движению поршней двигателя Стирлинга.

Но! Такое движение поршней подвластно не всем приводам и механизмам (смотрите На что мы не обращаем внимания или спрятанный мёртвый объём в Стирлингах). Этот график не соответствует КШМ (кривошипно-шатунный механизм) в нашем обычном понимании. Движение выше относится к ромбическому приводу в бета-Стирлинге. Теперь смотрим рисунок ниже.
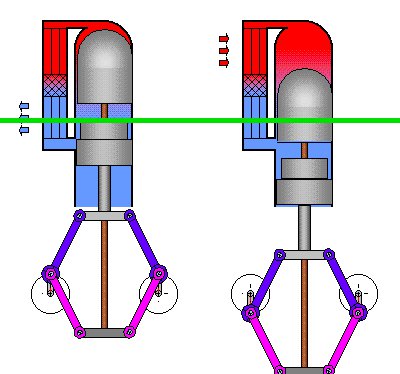
Обратите внимание на зелёную горизонтальную линию. Это и есть положение верхней мёртвой точки рабочего (нижнего) цилиндра. Как видно на рисунке справа, вытеснитель в своей нижней мёртвой точке опускается ниже ВМТ рабочего поршня. Это уже более приближённое движение, в отличии от обычного КШМ. Так почему же разработчики отказались от использования ромбического привода в двигателях? Ведь кроме бОльшего приближения к идеальному движению мы в добавок получает лучшую уравновешенность и меньшие габариты! Что не так в бета-Стирлингах? Чего мы опять не знаем?
А кому интересны данные темы, предлагаю подписаться на новые статьи (в правом сайтбаре).





Ответ прост — он сложный. Это выглядит красиво. Но в динамике вылезет много интересных сил второго и более порядка с таким количеством качающегося, вращающегося, трущегося. Да и первый порядок сил инерции ох как даст по голове. Много шарниров = много степеней свободы. На частотах до 1500 об/мин все будет красиво, а дальше, чем выше частота, тем больше инерционные силы, зависимости чаще всего квадратичные. Думаю, здесь вопрос экономической эффективности.